ISAAC-COSP
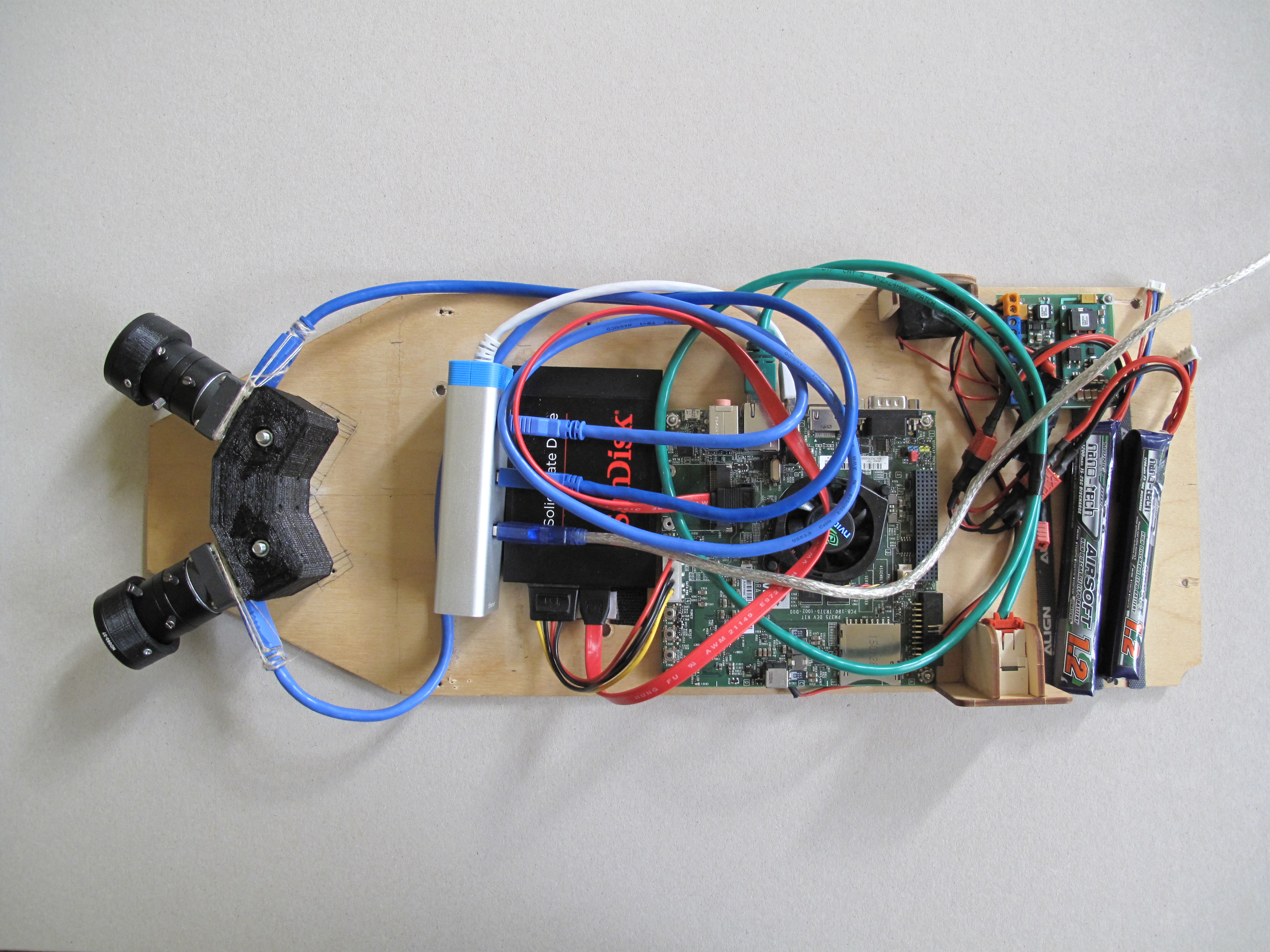
Our department develops a 2-camera vision system within the MTA-SZTAKI ISAAC internal project, which system can detect and track a small UAV in real-time on the Sindy aircraft. The system can also identify dangerous approaches.
Many algorithmic components are developed by other departments. We are responsible for the hardware, and the integration of software modules. We develop the detection and tracking algorithms.
This development is a part of the MTA-SZTAKI ISAAC (Image-based See and Avoid in Adverse Conditions) internal project. Our department cooperates with the Systems and Control Lab, and the Informatics Laboratory at SZTAKI.
To develop a 2-camera vision system, which can detect and track a small UAV in real-time on the Sindy aircraft. The system can also identify dangerous approaches, and generate avoidance order. The implementation of detection and tracking on various sky backgrounds and the investigation of possible non-sky background detection and tracking are the goals of this project.
Az integrated on-board vision system which can operate in real flight tests. Avoidance in the case of structured sky backgrounds. The summary of possible non-sky background detection and tracking methods.