Cooperative emergency trajectory design for connected autonomous vehicles
Introduction
One of the cornerstones of the development of autonomous vehicles nowadays increasingly focused on research is that the vehicle control system is able to plan the path of the vehicle taking into account the static and dynamic objects of the environment. Environmental sensing is based on sensors based on a variety of principles, such as ultrasound, radar, lidar, or machine vision based camera systems.
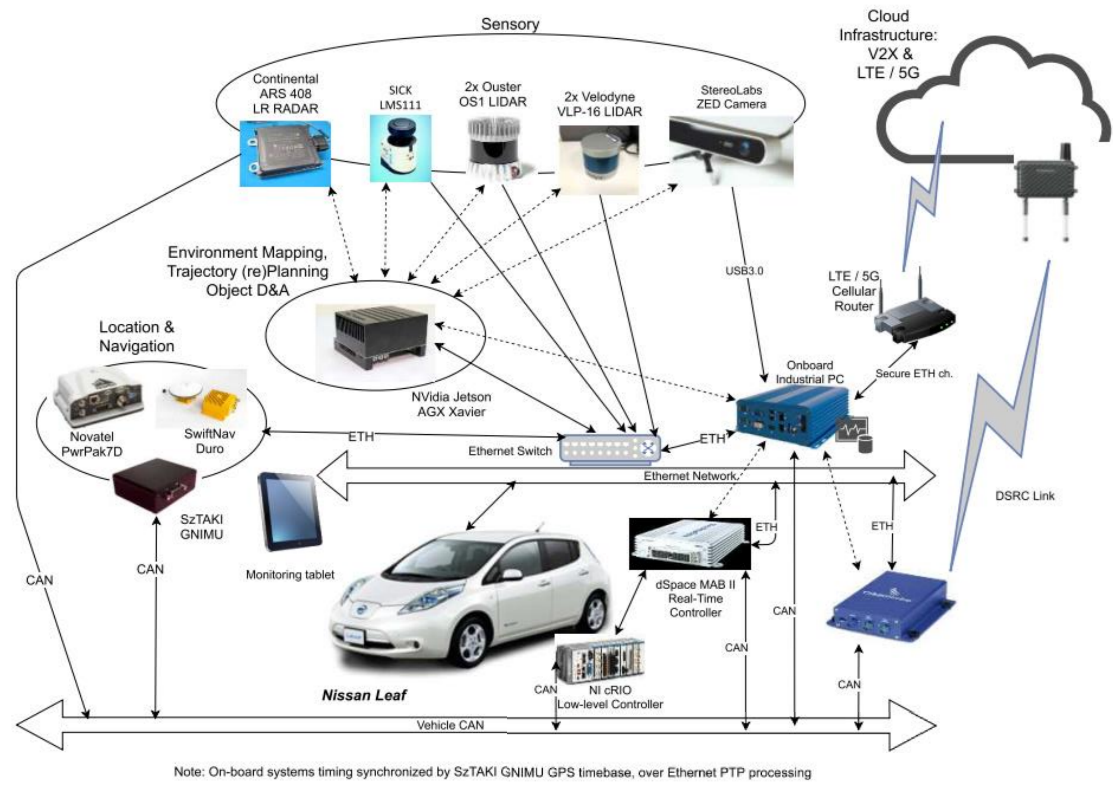
The unified evaluation of the information of these systems is performed by a high level environmental sensing system, on the basis of which the optimal trajectory for the autonomous vehicle can be determined. In fact, the design of a vehicle's trajectory is a solution to an optimization problem, which must always take into account the dynamic feasibility of the trajectory, i.e. guaranteeing the stability of the vehicle.
Research aims and objectives
The primary task of the research is to develop experimental methods of emergency maneuvering through machine learning for cooperative autonomous vehicles, which would be presented through the testing of a specific emergency situation in a real environment.
The Vietnamese partner instittution is the University of Transport and Communications.