Csaba Benedek gave a keynote lecture in Multi-sensorial Environment Perception at the ROBOVIS conference
A keynote lecture about multi-sensorial environment perception has been given at the International Conference on Robotics, Computer Vision and Intelligent Systems (ROBOVIS), by Csaba Benedek, a researcher of the Machine Perception Research Laboratory (MPLab).
The lecture gave an overview of the latest results of the MPLab Research Group on Geo-Information Computing, where the main target is to fuse the actual measurements of the newest available sensors used by self-driving vehicles and various sorts of data stored in the latest GIS architectures, enabling real time provision of detailed environmental data for autonomous navigation, offering new extended services for the vehicles' passengers, while city administrations get new tools for efficient and economic maintenance of the GIS databases.
The presenter introduced new scientific results in three main topics, which were accomplished in cooperation with his Ph.D. students, Balázs Nagy and Örkény Zováthi:
- automtatic transformation of mobile laser scanning (MLS) based point clouds to 3D maps,
- utilization of high definition 3D maps to support perception and localization based on on-board measurements
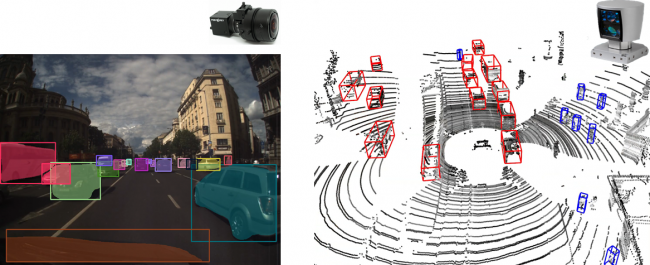
- automatic target-less calibration of Lidar and camera sensors, which is a crucial step for sensor fusion