Cover Page Article in the IEEE Geoscience and Remote Sensing Letters
A recent article from the Machine Perception Research Laboratory landed on the cover page of the July 2017 issue of IEEE Geoscience and Remote Sensing Letters.
In the paper, Attila Börcs, Balázs Nagy and Csaba Benedek propose a new approach for object classification in continuously streamed Lidar point clouds collected from urban areas, aiming to extract all vehicles and pedestrians in the neighborhood of the moving sensor. The authors present a complete pipeline for processing the raw Lidar measurement flow, including road-obstacle separation, object extraction and object recognition using a deep learning approach. At the end, the algorithms are tested and evaluated with real measurements collected from various dense urban regions.
Bibliographics data:
A. Börcs, B. Nagy and Cs. Benedek: "Instant Object Detection in Lidar Point Clouds", IEEE Geoscience and Remote Sensing Letters, vol. 14. no. 7, pp. 992 - 996, 2017, impact factor: 2.761
Caption for the cover page:
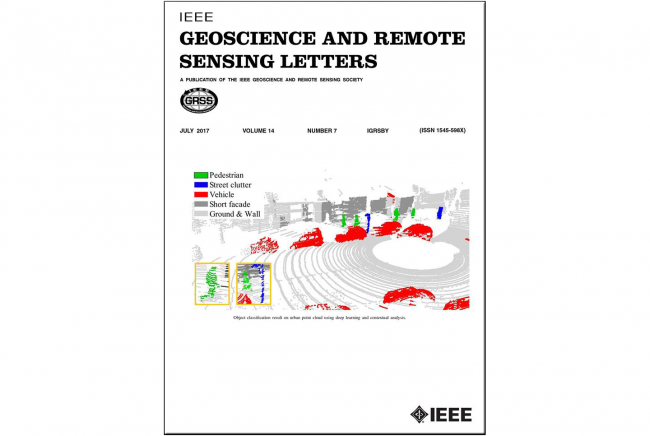
About the Cover: Result of object classification in a point cloud frame recorded by a Velodyne HDL-64 Lidar scanner in a dense urban environment. The detection and categorization is performed in real time, based on a deep learning based object appearance model, and object context analysis ensuring valid spatial alignment relations between various scene entities. In particular, vehicles and pedestrians are distinguished from other street clutter elements and wall segments, which objects are crucial for autonomous driving control systems. For more information please see “Instant Object Detection in Lidar Point Clouds,” by Börcs et al., which begins on page 992.